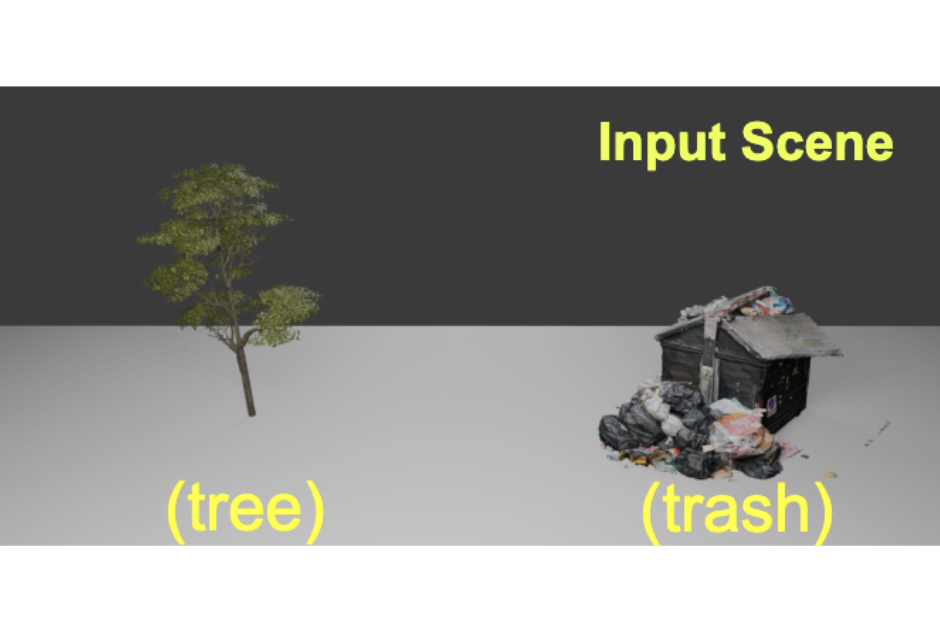
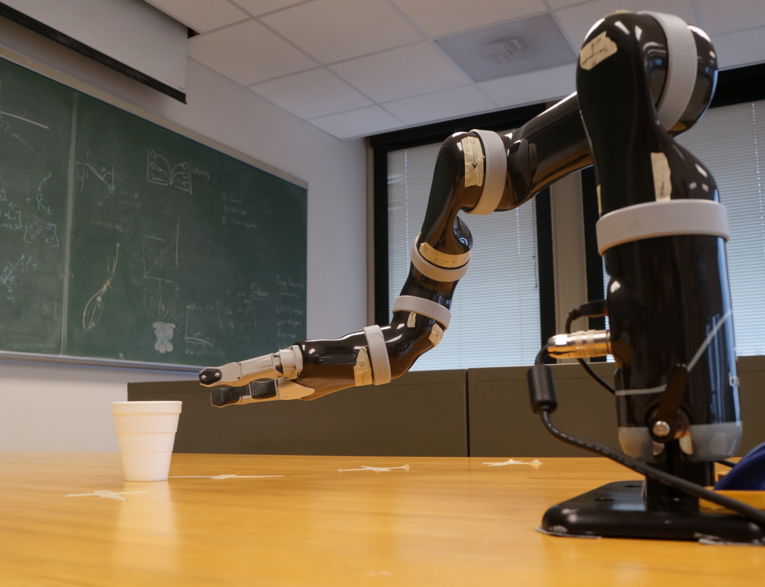
Visualizing LLM alignment and misalignment (independent research). Winter 2025
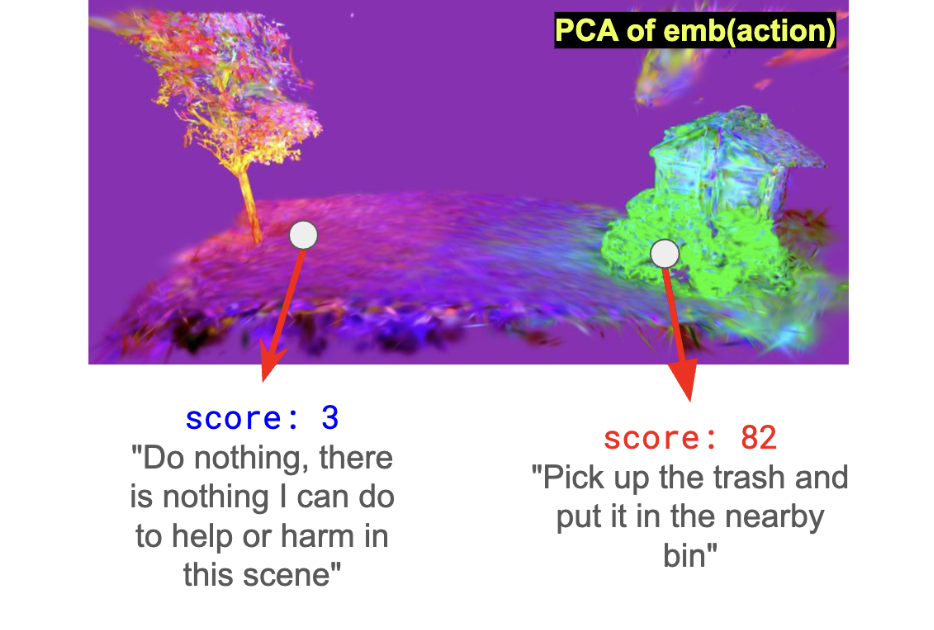
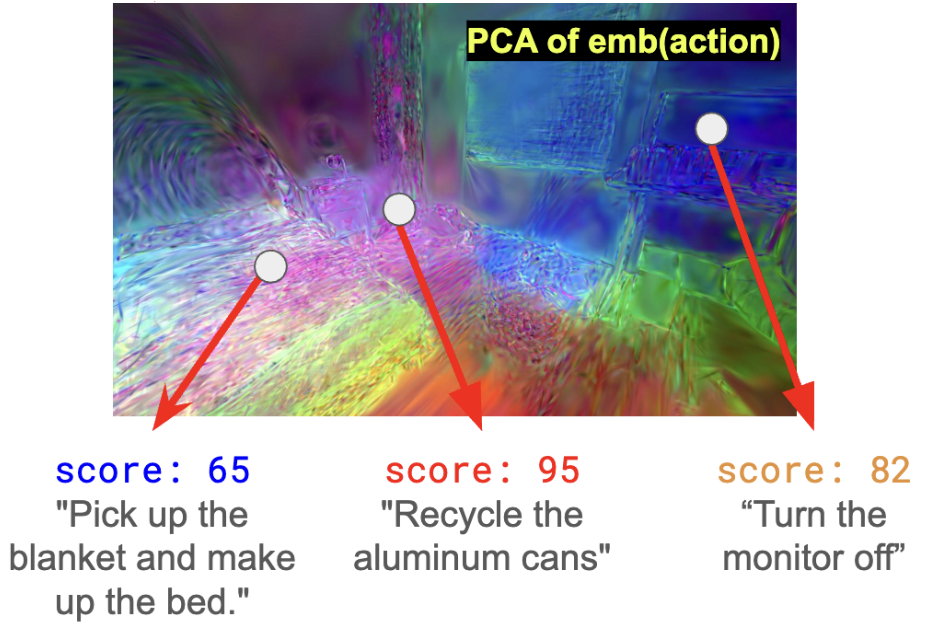
What does an LLM think is the right thing to do given a real-world scene? We can map its proposed actions into 3D space, pixel by pixel, using Vision-LLMs and Gaussian Splatting.

Automatic collage creation with Vision-LLMs (independent research). Winter 2024 → Present
Can LLMs succesfully make collages? This work is an extension of the ‘drawing with VLLM’ work, where, instead of writing SVG code, we allow an LLM to extract segments via text-prompting from collections of existing images, in order to create new images. This explores: LLMs capabilities to identify which image it wants to use, which segment it wants to pick, and whether it can use that segment to create something new with it.

Drawing with Vision-LLMs (independent research). Summer → Winter 2024
Can LLMs succesfully draw? This work explores an iterative generation process, where an LLM outputs pieces of a scene, part-by-part, in SVG format. Additionally, to compensate for their weaknesses in spatial understanding, we use an iterative placement agent for each individual part, allowing it to refine the placement and scaling until it is visually correct. This work also explore’s LLMs planning capabilities; once a component is placed, it can’t be moved. Can it order operations so that objects at the back are drawn first?
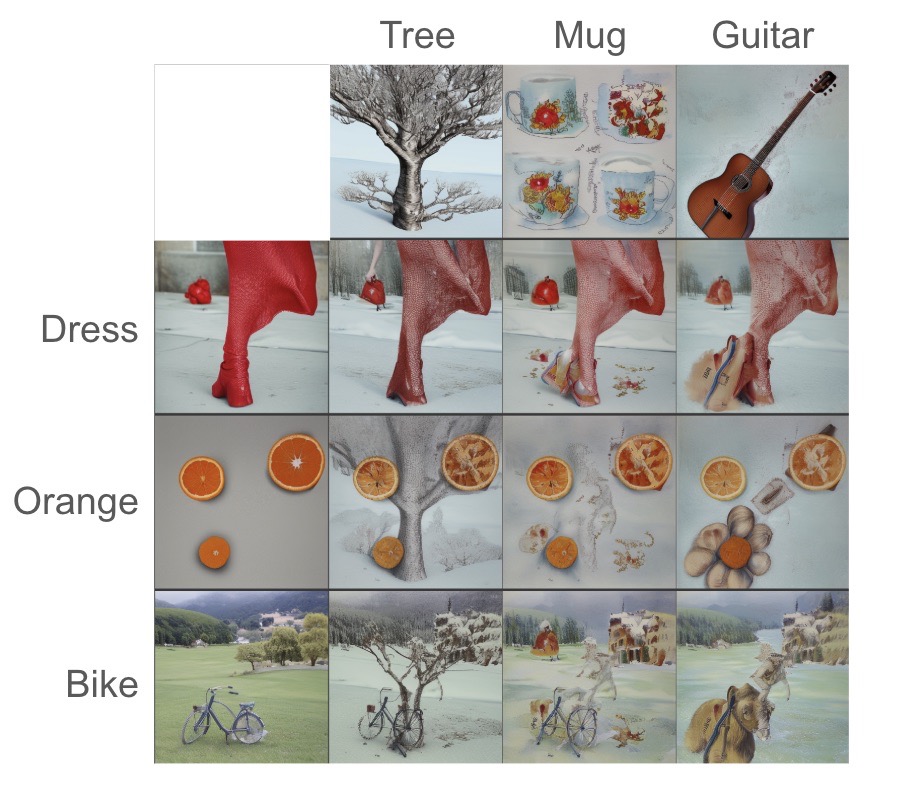
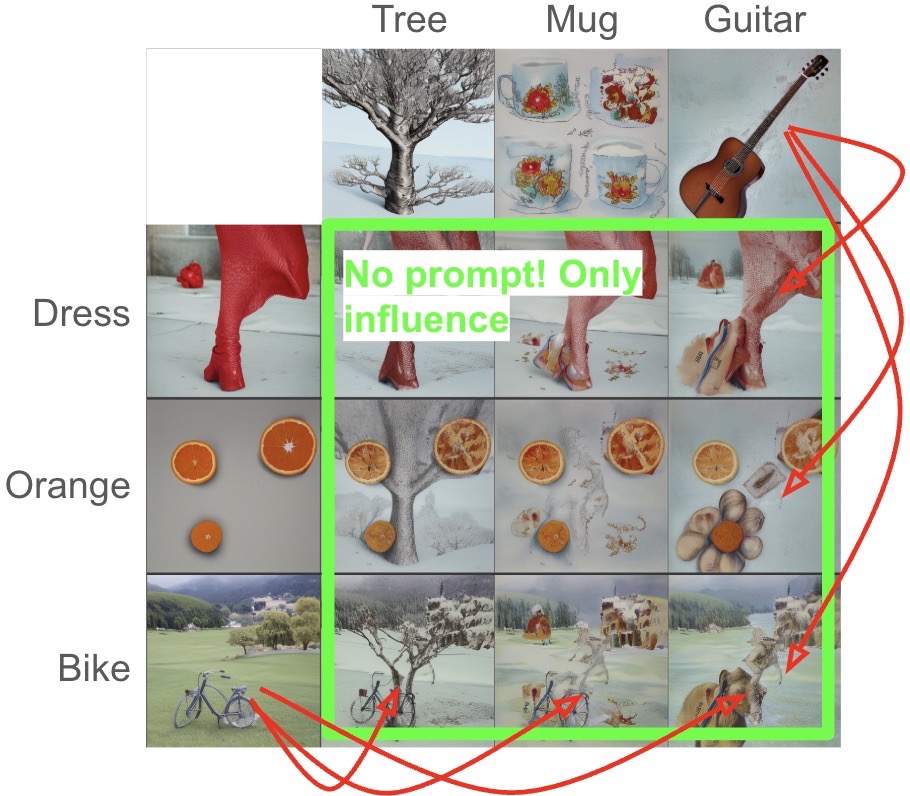
Generating coherent sets of images (independent research). Spring → Summer 2024
Imagine being able to generate images with defined relationships. For example, where image A relates to image B, B to C and D, D to E, …; in other words, a graph structure. By passing diffusion noise updates along graph edges, we can generate sets of images that are related to eachother in predefined ways. Exploration in this direction yields insights into how image generation latents can be combined, and whether their combination yields semantically meaningful results.
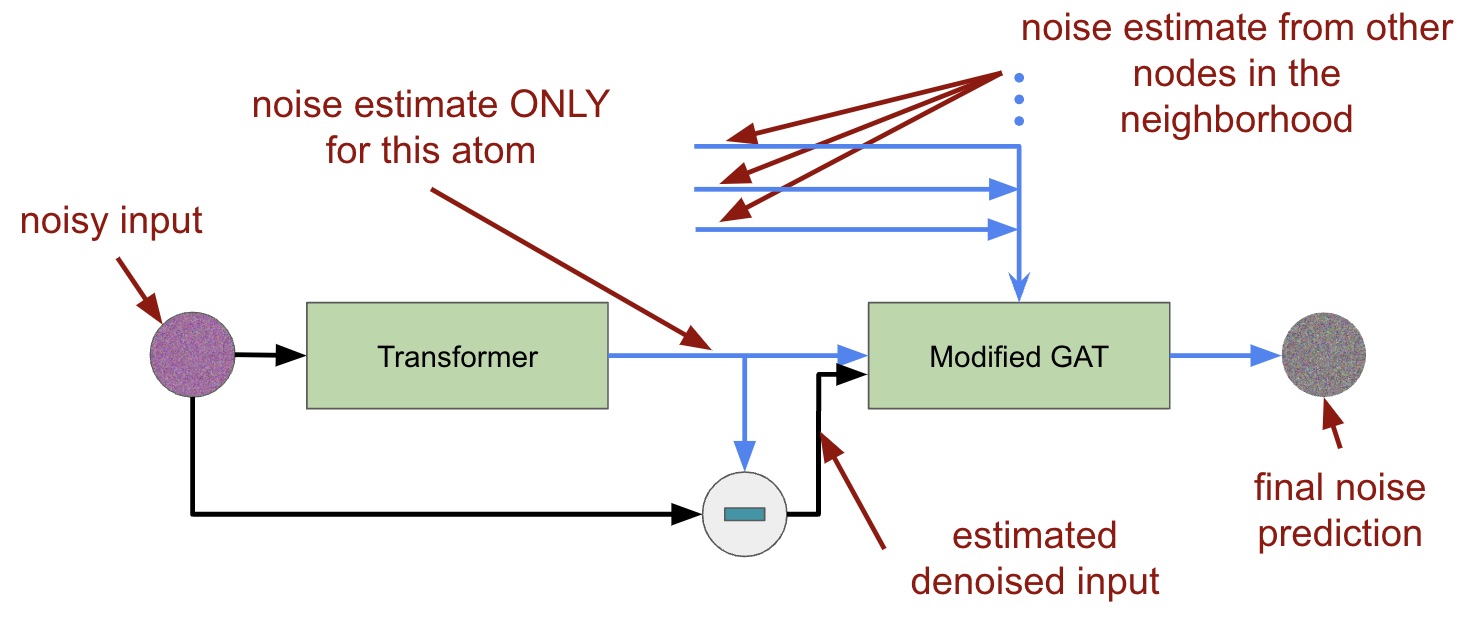
Molecule conformation research @ Northwestern University. Winter 2023 → Summer 2024
Worked with team of PhD students and AbbVie research scientists to develop new methods for molecular conformtation. Designed a novel diffusion-based E(3)-GNN for conformation, and implemented modifications on other SOTA conformation prediction techniques. Delivered presentation on my new technique to 20+ team members.
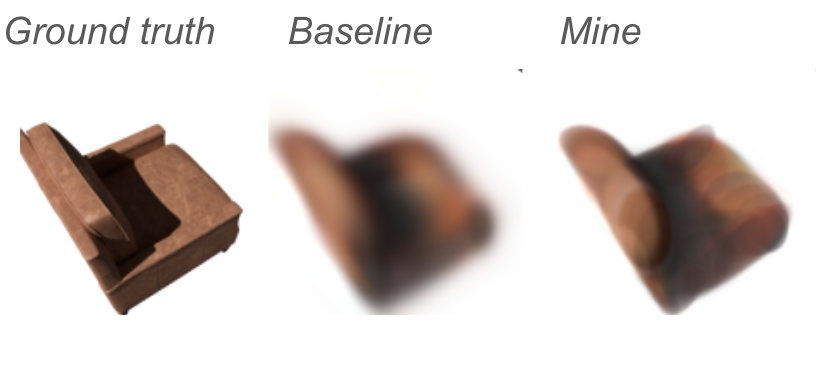
Generalized gaussian splatting (independent research). Winter 2023
Though gaussian splatting has achieved great results, the smooth nature of gaussians makes it tend towards having fuzzy edges, or requiring many gaussians at object boundaries. This work presents a solution: instead of using gaussians, use generalized gaussians. This allows for a learned ‘shape’ parameter, controlling the sharpness of the fall-off. With the same number of gaussians and the same number of training steps, generalized gaussian splatting achieved far sharper results.

Undergraduate Researcher @ Northwestern Assistive & Rehabilitation Robotics Laboratory. Fall → Winter 2022
Built tools in ROS to enable consistent and reliable control of 100+ experiments. Developed control code to sequence and synchronize up to 10 experiment phases with a robotic arm.
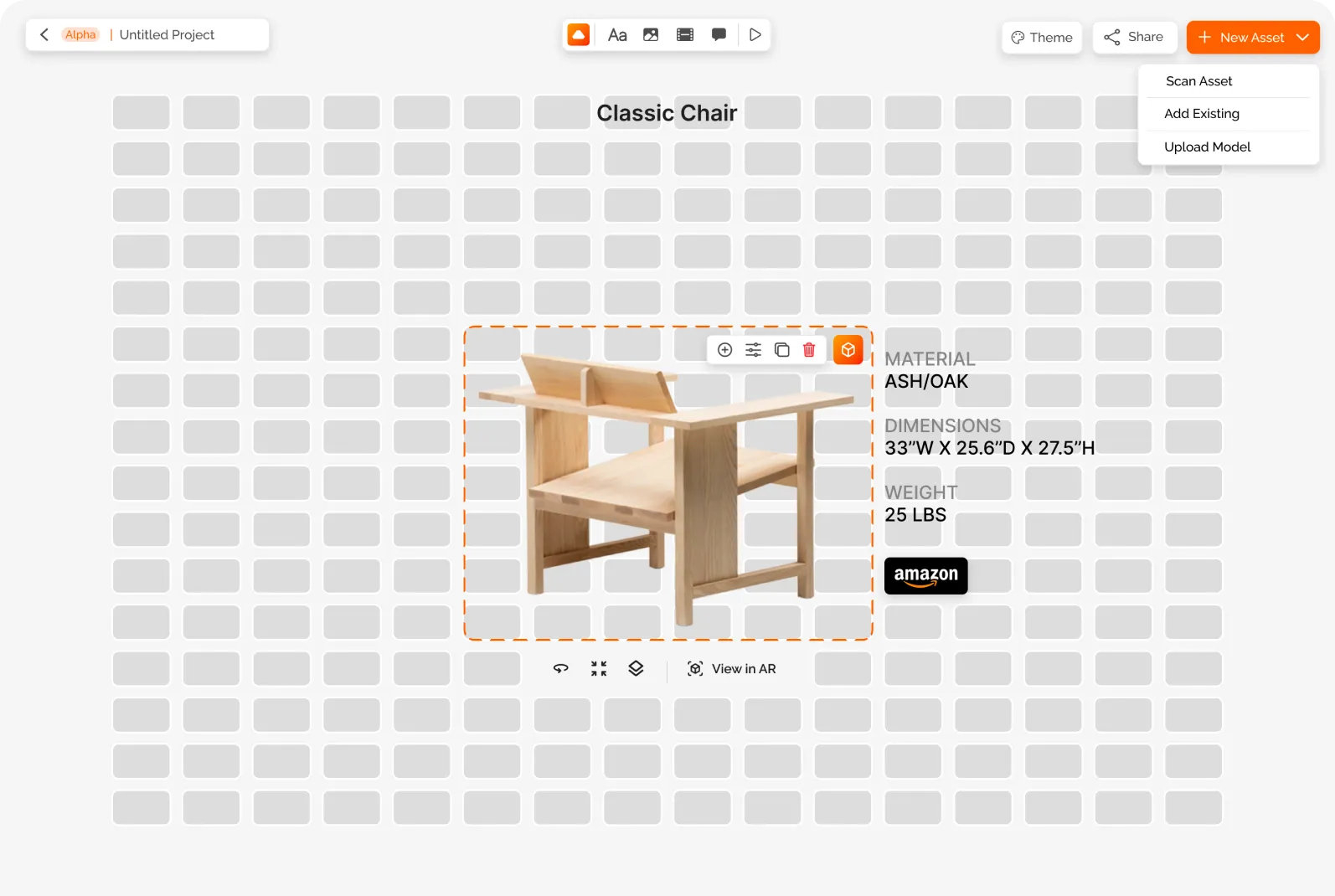
Co-founder, Backend Developer, Graphics Researcher @ Licon AI. Fall → Winter 2022
Developed all technology necessary for NeRF-powered e-commerce experience. Designed 3D object reconstruction and view synthesis techniques using differentiable rendering. Reimplemented and customized NeRF models including Plenoxels and InstantNGP with CUDA for accelerated training and inference. Built a Golang-based backend with gRPC for multiuser live document editing/management. Deployed solutions using Docker and Kubernetes. Integrated text-to-image and interactive video segmentation models for generative video background replacement.
Team Lead @ RoboCup@Home Education Competition. Summer 2021
Designed a vision-based system for autonomously carrying luggage and user-following tasks using pose estimation, object detection, and patch-based image similarity. Implemented with TensorFlow and PyTorch, optimized for open environments using Coral TPU accelerators and TensorRT. Led the team to the international finals.
Co-founder, Backend Developer @ 3D-printed PPE Distribution Non-profit. Summer → Winter 2020
Built infrastructure within three weeks to match nationwide PPE needs during COVID-19. Facilitated the distribution of 26,030 pieces of PPE by designing deployment architecture and contact/mailing systems. Hosted on Google Cloud Compute Engine using Gunicorn, NGINX, and Django.

Machine Learning Research Intern @ UCSD San Diego Supercomputer Center (SDSC). Summer 2019, 2020
Developed machine learning models to classify support tickets using Decision Trees, Naive Bayes, and SVMs. Improved classification accuracy by 15% over the existing solution using domain-specific data. Implemented models in base Python libraries and Scikit-learn.